Boost
C++ Libraries
Boost
C++ Libraries
...one of the most highly
regarded and expertly designed C++ library projects in the
world.
— Herb Sutter and Andrei
Alexandrescu, C++
Coding Standards
Boost
C++ Libraries
...one of the most highly
regarded and expertly designed C++ library projects in the
world.
— Herb Sutter and Andrei
Alexandrescu, C++
Coding Standards




Queries returns Values which meets some predicates. Currently
supported are three types of predicates:
For example queries may be used to retrieve Values:
There are various ways to perform a query. They are presented below. All
of them returns Values intersecting some region defined as a
Box.
Member function call
std::vector<Value> returned_values; Box box_region(...); rt.query(bgi::intersects(box_region), std::back_inserter(returned_values));
Free function call
std::vector<Value> returned_values; Box box_region(...); bgi::query(rt, bgi::intersects(box_region), std::back_inserter(returned_values));
Range generated by operator|
Box box_region(...); BOOST_FOREACH(Value & v, rt | bgi::adaptors::queried(bgi::intersects(box_region))) ; // do something with v
Query iterators returned by member functions
std::vector<Value> returned_values; Box box_region(...); std::copy(rt.qbegin(bgi::intersects(box_region)), rt.qend(), std::back_inserter(returned_values));
Query iterators returned by free functions
std::vector<Value> returned_values; Box box_region(...); std::copy(bgi::qbegin(rt, bgi::intersects(box_region)), bgi::qend(rt), std::back_inserter(returned_values));
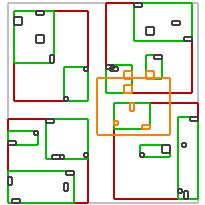
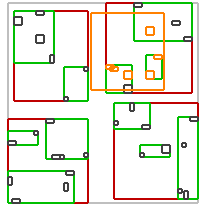
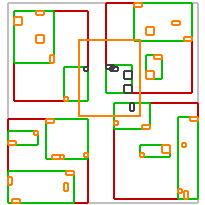
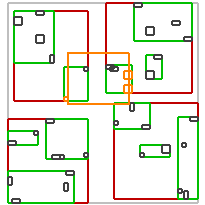
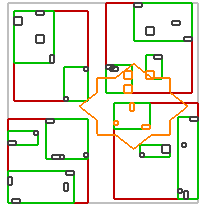
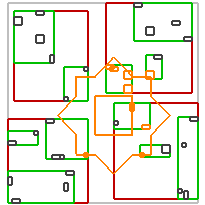
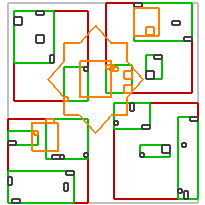
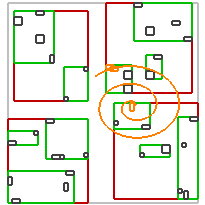
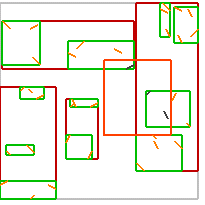
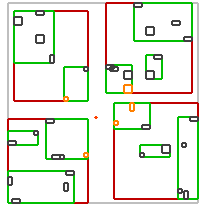
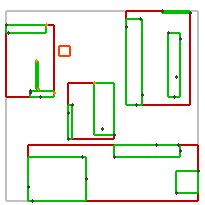
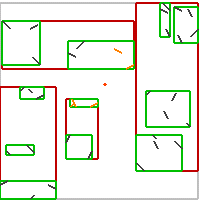
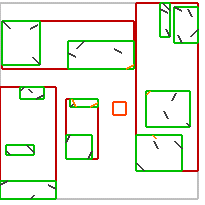
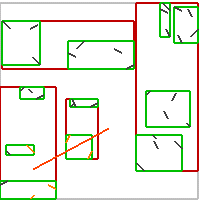
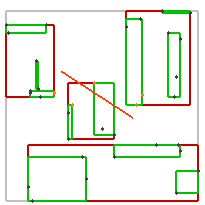
Queries using spatial predicates returns Values which are related
somehow to some Geometry - box, polygon, etc. Names of spatial predicates
correspond to names of Boost.Geometry algorithms (boolean operations). Examples
of some basic queries may be found in the tables below. The query region
and result Values are orange.
|
intersects(Box) |
covered_by(Box) |
disjoint(Box) |
overlaps(Box) |
within(Box) |
|---|---|---|---|---|
|
|
|
|
|
|
|
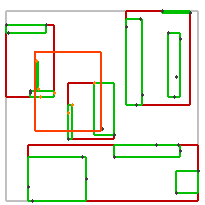
intersects(Ring) |
intersects(Polygon) |
intersects(MultiPolygon) |
intersects(Segment) |
intersects(Linestring) |
|---|---|---|---|---|
|
|
|
|
|
|
|
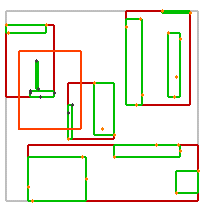
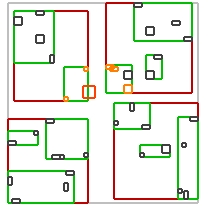
intersects(Box) |
disjoint(Box) |
intersects(Box) |
disjoint(Box) |
|---|---|---|---|
|
|
|
|
|
Spatial predicates are generated by functions defined in boost::geometry::index
namespace.
rt.query(index::contains(box), std::back_inserter(result)); rt.query(index::covered_by(box), std::back_inserter(result)); rt.query(index::covers(box), std::back_inserter(result)); rt.query(index::disjont(box), std::back_inserter(result)); rt.query(index::intersects(box), std::back_inserter(result)); rt.query(index::overlaps(box), std::back_inserter(result)); rt.query(index::within(box), std::back_inserter(result));
All spatial predicates may be negated, e.g.:
rt.query(!index::intersects(box), std::back_inserter(result)); // the same as rt.query(index::disjoint(box), std::back_inserter(result));
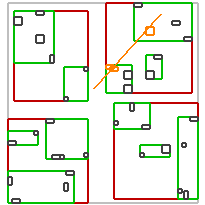
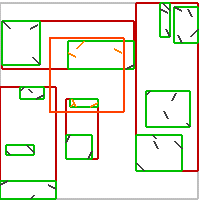
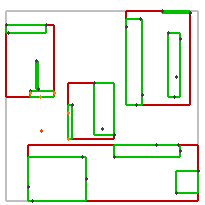
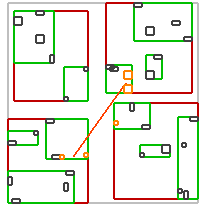
Nearest neighbours queries returns Values which are closest
to some Geometry. The examples of k-NN queries are presented below. 5 Values
nearest to the Geometry are orange.
|
nearest(Point, k) |
nearest(Box, k) |
nearest(Point, k) |
nearest(Box, k) |
|---|---|---|---|
|
|
|
|
|
|
nearest(Segment, k) |
nearest(Point, k) |
nearest(Box, k) |
nearest(Segment, k) |
nearest(Segment, k) |
|---|---|---|---|---|
|
|
|
|
|
|
To perform the knn query one must pass the nearest predicate generated by
the nearest()
function defined in boost::geometry::index
namespace. For non-point Indexables the shortest distance is
calculated using bg::comparable_distance()
function. The following query returns k
Values closest to some Point in space.
std::vector<Value> returned_values; Point pt(/*...*/); rt.query(bgi::nearest(pt, k), std::back_inserter(returned_values));
The same way different query Geometries can be used:
Box box(/*...*/); rt.query(bgi::nearest(box, k), std::back_inserter(returned_values)); Segment seg(/*...*/); rt.query(bgi::nearest(seg, k), std::back_inserter(returned_values));
The user may pass a UnaryPredicate
- function, function object or lambda expression taking const reference to
Value and returning bool. This object may be passed to the query in order
to check if Value should be returned by the query. To do it
one may use index::satisfies()
function like on the example below:
bool is_red(Value const& v) { return v.is_red(); } struct is_red_o { template <typename Value> bool operator()(Value const& v) { return v.is_red(); } } // ... rt.query(index::intersects(box) && index::satisfies(is_red), std::back_inserter(result)); rt.query(index::intersects(box) && index::satisfies(is_red_o()), std::back_inserter(result)); #ifndef BOOST_NO_CXX11_LAMBDAS rt.query(index::intersects(box) && index::satisfies([](Value const& v) { return v.is_red(); }), std::back_inserter(result)); #endif
satisfies()
may be negated, e.g.:
bool is_red(Value const& v) { return v.is_red(); } bool is_not_red(Value const& v) { return !v.is_red(); } // ... rt.query(index::intersects(box) && index::satisfies(is_red), std::back_inserter(result)); // the same as rt.query(index::intersects(box) && !index::satisfies(is_not_red), std::back_inserter(result));
It's possible to use some number of predicates in one query by connecting
them with operator&&
e.g. Pred1 &&
Pred2 &&
Pred3 &&
....
These predicates are connected by logical AND. Passing all predicates together
not only makes possible to construct advanced queries but is also faster
than separate calls because the tree is traversed only once. Traversing is
continued and Values are
returned only if all predicates are met. Predicates are checked left-to-right
so placing most restrictive predicates first should accelerate the search.
rt.query(index::intersects(box1) && !index::within(box2), std::back_inserter(result)); rt.query(index::intersects(box1) && !index::within(box2) && index::overlaps(box3), std::back_inserter(result));
Of course it's possible to connect different types of predicates together.
index::query(rt, index::nearest(pt, k) && index::within(b), std::back_inserter(returned_values)); BOOST_FOREACH(Value & v, rt | index::adaptors::queried(index::nearest(pt, k) && index::covered_by(b))) ; // do something with v
The query performed using query iterators may be paused and resumed if needed,
e.g. when the query takes too long, or may be stopped at some point, when
all interesting values were gathered. The query iterator is returned by
qbegin()
member function which requires passing predicates, like query() member function.
for ( Rtree::const_query_iterator it = tree.qbegin(bgi::nearest(pt, 10000)) ; it != tree.qend() ; ++it ) { // do something with value if ( has_enough_nearest_values() ) break; }
![[Note]](../../../../../../doc/src/images/note.png) |
Note |
|---|---|
In the case of iterative k-NN queries it's guaranteed to iterate over the
closest |
![[Warning]](../../../../../../doc/src/images/warning.png) |
Warning |
|---|---|
The modification of the |
There are several ways of inserting Values returned by a query to the other R-tree container. The most basic way is creating a temporary container for Values and insert them later.
namespace bgi = boost::geometry::index; typedef std::pair<Box, int> Value; typedef bgi::rtree< Value, bgi::linear<32, 8> > RTree; RTree rt1; /* some inserting into the tree */ std::vector<Value> result; rt1.query(bgi::intersects(Box(/*...*/)), std::back_inserter(result)); RTree rt2(result.begin(), result.end());
However there are better ways. One of these methods is mentioned in the "Creation and modification" section. The insert iterator may be passed directly into the query.
RTree rt3; rt1.query(bgi::intersects(Box(/*...*/))), bgi::inserter(rt3));
If you're a user of Boost.Range you'll appreciate the third option. You may
pass the result Range directly into the constructor or insert() member function.
RTree rt4(rt1 | bgi::adaptors::queried(bgi::intersects(Box(/*...*/)))));