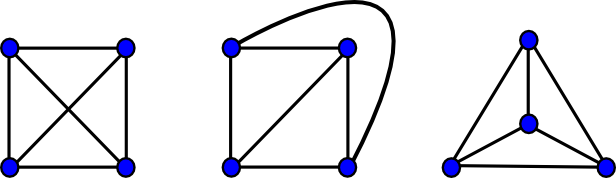
Two examples of non-planar graphs are K5, the complete graph on
five vertices, and K3,3, the complete bipartite graph on six
vertices with three vertices in each bipartition. No matter how the vertices
of either graph are arranged in the plane, at least two edges are forced to
cross.
K5 (left) and K3,3 (right) -
the two Kuratowski subgraphs

|
The above graphs are both minimal examples of non-planarity within
their class of graphs; delete any edge or vertex from either one and the
resulting graph is planar. A theorem of Kuratowski singles these two graphs
out as fundamental obstructions to planarity within any graph:
A graph is planar if and only if it does not contain a subgraph that is an
expansion[1] of either K5 or K3,3
A subgraph that is an expansion of K5 or K3,3 is called
a Kuratowski subgraph. Because of
the above theorem, given any graph, one can produce either a plane drawing of
a graph, which will certify that the graph is planar, or a minimal set of edges
that forms a Kuratowski subgraph, which will certify that the graph is
non-planar - in both cases, the certificate of planarity or non-planarity is
easy to check.
Any plane drawing separates the plane into distinct regions bordered by graph
edges called faces. As a simple example, any embedding of a triangle
into the plane separates it into two faces: the region inside the triangle and
the (unbounded) region outside the triangle. The unbounded region outside the
graph's embedding is called the outer face. Every embedding yields
one outer face and zero or more inner faces. A famous result called
Euler's formula states that for any
planar graph with n vertices, e edges, f faces, and
c connected components,
n + f = e + c + 1
This formula implies that any planar graph with no self-loops or parallel edges
has at most 3n - 6 edges and 2n- 4 faces. Because of these
bounds, algorithms on planar graphs can run in time O(n) or space
O(n) on an n vertex graph even if they have to traverse all
edges or faces of the graph.
A convenient way to separate the actual planarity test from algorithms that
accept a planar graph as input is through an intermediate structure called a
planar embedding. Instead of specifying the absolute positions of the
vertices and edges in the plane as a plane drawing would, a planar embedding
specifies their positions relative to one another. A planar embedding consists
of a sequence, for each vertex in the graph, of all of the edges incident on
that vertex in the order in which they are to be drawn around that vertex.
The orderings defined by this sequence
can either represent a clockwise or counter-clockwise iteration through the
neighbors of each vertex, but the orientation must be
consistent across the entire embedding.
In the Boost Graph Library, a planar embedding is a model of the
PlanarEmbedding concept. A type that
models PlanarEmbedding can be passed into the planarity test and populated if
the input graph is planar. All other "back end" planar graph algorithms accept
this populated PlanarEmbedding as an input. Conceptually, a type that models
PlanarEmbedding is a property
map that maps each vertex to a sequence of edges,
where the sequence of edges has a similar interface to a standard C++
container. The sequence of edges each vertex maps to represents the ordering
of edges adjacent to that vertex. This interface is flexible enough to allow
storage of the planar embedding independent from the graph in, say, a
std::vector of std::vectors, or to allow for graph
implementations that actually store lists of adjacent edges/vertices to
internally re-arrange their storage to represent the planar embedding.
Currently, only the former approach is supported when using the native graph
types (adjacency_list, adjacency_matrix, etc.)
of the Boost Graph Library.
Tools for working with planar graphs in the Boost Graph Library
The Boost Graph Library planar graph algorithms all work on undirected graphs.
Some algorithms require certain degrees of connectivity of the input graph,
but all algorithms work on graphs with self-loops and parallel edges.
The function boyer_myrvold_planarity_test
can be used to test whether or not a graph is planar, but it can also
produce two important side-effects: in the case the graph is not planar, it can
isolate a Kuratowski subgraph, and in the case the graph is planar, it can
compute a planar embedding. The Boyer-Myrvold algorithm works on any undirected
graph.
An undirected graph is connected if, for any two vertices u and
v, there's a path from u to v. An undirected graph is
biconnected if it is connected and it remains connected even if any
single vertex is removed. Finally, a planar graph is
maximal planar (also called
triangulated) if no additional edge (with the exception of self-loops
and parallel edges) can be added to it without creating
a non-planar graph. Any maximal planar simple graph on n > 2 vertices
has exactly 3n - 6 edges and 2n - 4 faces, a consequence of
Euler's formula. If a planar graph isn't connected, isn't biconnected, or isn't
maximal planar, there is some set of edges that can be added to the graph to
make it satisfy any of those three properties while preserving planarity. Many
planar graph drawing algorithms make at least one of these three assumptions
about the input graph, so there are functions in the Boost Graph Library that
can help:
- make_connected adds a minimal
set of edges to an undirected graph to make it connected.
- make_biconnected_planar
adds a set of edges to a connected, undirected planar graph to make it
biconnected while preserving planarity.
- make_maximal_planar adds a
set of edges to a biconnected, undirected planar graph to make it maximal
planar.
Some algorithms involve a traversal of the faces of the graph, and the Boost
Graph Library has the generic traversal function
planar_face_traversal for
this purpose. This traversal, like other traversals in the Boost Graph Library,
can be customized by overriding event points in an appropriately defined
visitor class.
An intermediate step in some drawing algorithms for planar graphs is the
creation of
a canonical ordering of the vertices. A canonical ordering is a
permutation of the vertices of a maximal planar graph. It orders the vertices
in a way that makes it straightforward to draw the ith vertex once the
first (i-1) vertices have been drawn - the only edges connecting the
ith vertex to vertices already drawn will be adjacent to a consecutive
sequence of vertices along the outer face of the partially embedded graph. The
function
planar_canonical_ordering
will create such an ordering, given a maximal planar graph and a planar
embedding of that graph.
A straight line drawing can be created using the function
chrobak_payne_straight_line_drawing,
which takes a maximal planar graph, a planar embedding of that
graph, and a canonical ordering as input. The resulting drawing maps all of the
vertices from a graph with n vertices to integer coordinates on a
(2n-4) x (n-2) grid such that when the edges of the graph are drawn
as line segments connecting vertices, no two edges cross. Self-loops and
parallel edges are ignored by this algorithm.
Finally, there are two functions that can be used to verify the results of the
boyer_myrvold_planarity_test and
chrobak_payne_straight_line_drawing functions:
- is_kuratowski_subgraph
takes the output of boyer_myrvold_planarity_test on a nonplanar graph
and verifies that it can be contracted into a graph isomorphic to a Kuratowski
subgraph.
- is_straight_line_drawing
takes the output of chrobak_payne_straight_line_drawing and uses
a planar sweep algorithm to verify that none of the embedded edges intersect.
Complexity
Most of the algorithms in the Boost Graph Library that deal with planar graphs
run in time O(n) on an input graph with n vertices. This achieves
a theoretically optimal bound (you must at least iterate over all n
vertices in order to embed a graph in the plane.) However, some of the work
that goes into achieving these theoretically optimal time bounds may come at
the expense of practical performance. For example, since any comparison-based
sorting algorithm uses at least on the order of n log n comparisons in
the worst case, any time an algorithm dealing with planar graphs needs to sort,
a bucket sort is used to sort in O(n) time. Also, computing a planar
embedding of a graph involves maintaining an ordered list of edges around a
vertex, and this list of edges needs to support an arbitrary sequence of
concatenations and reversals. A std::list can only guarantee
O(n2) for a mixed sequence of n concatenations and
reversals (since reverse is an O(n) operation.) However, our
implementation achieves O(n) for these operations by using a list data
structure that implements mixed sequences of concatenations and reversals
lazily.
In both of the above cases, it may be preferable to sacrifice the nice
theoretical upper bound for performance by using the C++ STL. The bucket sort
allocates and populates a vector of vectors; because of the overhead in
doing so, std::stable_sort may actually be faster in some cases.
The custom list also uses more space than std::list, and it's not
clear that anything other than carefully constructed pathological examples
could force a std::list to use n2 operations within
the planar embedding algorithm. For these reasons, the macro
BOOST_GRAPH_PREFER_STD_LIB exists, which, when defined, will force
the planar graph algorithms to use std::stable_sort and
std::list in the examples above.
See the documentation on individual algorithms for more information about
complexity guarantees.
Examples
- Testing whether or not a
graph is planar.
- Creating a straight line
drawing of a graph in the plane.
Notes
[1] A graph G' is an expansion of a graph G if
G' can be created from G by a series of zero or more edge
subdivisions: take any edge {x,y} in the graph, remove it, add a new
vertex z, and add the two edges {x,z} and {z,y} to the
graph. For example, a path of any length is an expansion of a single edge and
a cycle of any length is an expansion of a triangle.
Copyright © 2007 Aaron Windsor (
aaron.windsor@gmail.com)
 Boost
C++ Libraries
Boost
C++ Libraries