Polygon Sponsor
|
THE BOOST.POLYGON VORONOI LIBRARY
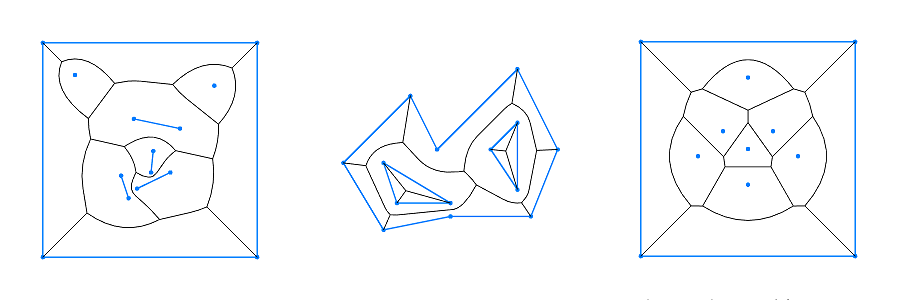
The Boost.Polygon Voronoi library provides functionality to construct the Voronoi diagram
of a set of points and linear segments in 2D space with the following
set of
limitations:
- coordinates of the input points and endpoints of the
segments
should be of the integer type;
- input segments should not overlap
except their endpoints.
While the first restriction is permanent (it
allows to give the exact warranties about the output precision and
algorithm execution),
the second one may be resolved using the Boost.Polygon functionality.
The strong sides of the
library and main benefits comparing to the other implementations are
discussed in the following paragraphs.
Robustness and Efficiency
Let's explain a bit those terms. The efficiency is simply measured by
the time it takes the algorithm to execute. The robustness is a bit
more harder to explain. But those of you who had the experience with
the following situations would understand what it doesn't mean: application segfaults randomly, algorithm output contains
degeneracies or is completely invalid (e.g. a point is considered to be outside of the polygon,
while should be inside). In other words robust implementation doesn't
fail and produces expected output in 100% of cases, thus user can rely
on
it. Robustness is a weak place of the most non-commercial
implementations of any complex geometric algorithm. The main issues could be divided onto two main categories: memory management
issues, numeric stability issues. Our implementation avoids the
first type of issues using pure STL data structures, thus you won't find
any operator new in the code. The second category of problems is
resolved using multiprecision geometric
predicates.
Even for commercial implementations usage of such predicates usually
results in a huge performance slowdown. Here is another strong side of
the Boost.Polygon
Voronoi library: we avoid multiprecision computations in 95% of cases
using
extremely fast floating-point predicates. Yes, those are not always
exact, but we developed the relative
error arithmetic apparatus to identify them and switch to the
higher precision predicates when required.
Precision of the Output Structures
One of the extremely important results of using two types of predicates
is that library efficiently computes relatively precise coordinates of
the output geometries. Here we will explain a bit what exactly
"relatively precise" means and how the received output may differ from
the theoretically correct one (here and after we assume that output
coordinate type is the IEEE-754 floating-point type).
Voronoi implementation guaranties that the relative error of the
coordinates of the output
geometries is always not higher than 64 machine epsilons (6
bits of mantissa), while in many cases it is slightly less. That also
means that using floating-point type with the larger mantissa will
produce more precise output. Let's consider
the following example: the output Voronoi
vertex has double (53-bit mantissa) x-coordinate equal to 1.0, then the
absolute error is at most 2^-53 * 2^6 = 2^-47 and the exact value of
x-coordinate lies in the range [1.0 - 2^-47, 1.0 + 2^-47]. For
x-coordinate equal to 2^31, the absolute error will be at most 2^-53 *
2^31 * 2^6 = 2^-16 and the exact value of x-coordinate lies in the
range
[2^31 - 2^-16, 2^31 + 2^16]. For the output Voronoi vertex with long
double
(64-bit mantissa) x-coordinate equal to 2^31, the absolute error will
be at most 2^-64 * 2 ^31 * 2^6 = 2^-27 and the exact value of
x-coordinate
lies in the range [2^31-2^-27, 2^31+2^-27]. If you'd like to become
master of the absolute and relative error try this article.
During the finalization step the implementation unites Voronoi vertices whose both
coordinates are situated within the relative error range equal to 128
machine epsilons and removes any Voronoi edges between them. That is
the only case that might cause differences between the algorithm output
topology and theoretically precise one. Now let's see what is the practical
impact of this. Consider the following example: we are going to construct the
Voronoi diagram of our Solar System. The radius of our Solar System is
approximately 2^42 metres, and we are going to snap it to the integer
grid of [-2^42; 2^42] x [-2^42; 2^42]. Let's choose the long double
(64 bit mantissa) output coordinate type, then the maximum absolute error
for the output geometries within our Solar System will be on its boundaries
and equal to 2^-64 * 2^42 * 2^6 = 2^-18 metres. In the output we are going to
consider vertices with both coordinates that are within 2^-17 metres (8
micrometres) distance to be equal. That distance is equal to
the size of a bacteria and is relative to the Solar System size.
Fully Functional with Segments
There are not many implementations of the Voronoi diagram construction
algorithm that could
handle linear segment inputs, even considering the commercial libraries.
Support of the
segments allows to discretize any input geometry (circle, ellipse,
parabola). Of course as the result those might have floating-point
coordinates, but that is resolved using scaling and snapping to the
integer grid. This functionality is very handy as it allows to compute
the medial axis transform of the arbitrary set of input geometries. So
one may start
using it for the next generation pattern recognition or computer vision
project.
Basic and Advanced Usage Cases
The main library header voronoi.hpp
defines the following static functions to integrate the Voronoi library functionality with the Boost.Polygon interfaces:
template <typename Point, typename VB>
size_t insert(const Point &point, VB *vb)
|
Inserts a point into the Voronoi builder data structure.
Point type should model the point concept.
Returns index number of the inserted site.
|
template <typename PointIterator, typename VB>
void insert(PointIterator first,
PointIterator last,
VB *vb)
|
Inserts an iterator range of points into the Voronoi builder data structure.
Corresponding point type should model the point concept.
|
template <typename Segment, typename VB>
size_t insert(const Segment &segment, VB *vb)
|
Inserts a segment into the Voronoi builder data structure.
Segment type should model the segment concept.
Returns index number of the inserted site.
|
template <typename SegmentIterator, typename VB>
void insert(SegmentIterator first,
SegmentIterator last,
VB *vb)
|
Inserts an iterator range of segments into the Voronoi builder data structure.
Corresponding segment type should model the segment concept.
|
template <typename PointIterator, typename VD>
void construct_voronoi(PointIterator first,
PointIterator last,
VD *vd)
|
Constructs Voronoi diagram of a set of points.
Corresponding point type should model the point concept.
|
template <typename SegmentIterator, typename VD>
void construct_voronoi(SegmentIterator first,
SegmentIterator last,
VD *vd)
|
Constructs Voronoi diagram of a set of segments.
Corresponding segment type should model the segment concept.
|
template <typename PointIterator,
typename SegmentIterator,
typename VD>
void construct_voronoi(PointIterator p_first,
PointIterator p_last,
SegmentIterator s_first,
SegmentIterator s_last,
VD *vd)
|
Constructs Voronoi
diagram of a set of points and segments.
Corresponding point type should model the point concept.
Corresponding segment type should model the segment concept.
|
This
means that it's possible to construct the Voronoi diagram with the
following two lines of code (if corresponding input types satisfy the Boost.Polygon concept model):
voronoi_diagram<double>
vd;
construct_voronoi(points.begin(), points.end(), &vd);
The library also provides the clear interfaces to
associate user data with the output geometries and efficiently traverse Voronoi graph.
More details on those are covered in the basic Voronoi tutorial. Advanced usage of the library with the configuration of the coordinate
types is explained in the advanced
Voronoi tutorial.
The library also allows users to implement their own Voronoi diagram /
Delaunay triangulation construction routines based on the Voronoi builder API.
No Third Party Dependencies
Yes,
the library doesn't depend on any 3rd party code. Even more than that
there is only one dependency on the Boost libraries: boost/cstdint.hpp.
All the required multiprecision types functionality is implemented as
part of the library and is not exposed to the user. Considering the
fact that Voronoi implementation consists of just 7 headers (3 public
and 4 private) it is easy to compile it within a minute after download.
On the other hand voronoi.hpp header provides integration routines with
the Boost.Polygon concepts and models with a drawback of additional
dependencies. Extensible for the User Provided Coordinate Types
Our implementation is coordinate type agnostic. That means that as soon
as user provided types satisfy the set of restrictions of the Voronoi builder coordinate type traits
and implement methods required by the library, no changes are required
neither to the algorithm, nor to the implementation of the predicates. So it's
possible to
construct Voronoi diagram for the 256-bit integer input coordinate type
and
512-bit output floating-point type without making any changes to the
internal code.
Bright Future
Below one may find the list of the main directions for the future
development of the library.
High-priority tasks that already have approximate implementation plan
are the following (some of those may be proposed as future GSoC projects):
- Implementing Delaunay triangulation data structure.
Note: only data structure needs to be implemented that properly
processes events provided by the Voronoi builder.
- Implementing medial axis transform data structure.
Note: in general case the Voronoi diagram has completely the same
geometry
as the medial axis (they are 100% equal), however for many applications
user is not interested in the Voronoi edges inside the hole regions.
The main point
of this data structure is to automatically filter Voronoi edges that
belong to those areas.
- Voronoi
diagram data structure could be used to find K nearest neighbors of N
sites in O(N*K*log(K) + N*log(N)) time. The return value would be a
list of the k nearest neighbors for each site.
- Using the r-tree data structure built on top of the
bounding rectangles around the Voronoi cells to answer the nearest
neighbor queries in log(N) time, where N is the number of the Voronoi cells.
Note: there should be r-tree data structure available soon as part of
the Boost libraries.
- Providing interface to retrieve the convex hull of a set of
points and segments from the Voronoi builder once the Voronoi diagram is
constructed in O(N) time.
- Providing serialization utilities for the Voronoi diagram data structure.
High-priority tasks to be considered:
- Dropping the restriction on the non-intersecting input
geometries.
- Integration of the Voronoi diagram data structure with the BGL (Boost
Graph Library).
- Support of the other types of distance metrics.
- Construction of the constrained Delaunay triangulation.
- Support of the circular input geometries.
Based on the community suggestions priorities may be changed.
Theoretical Research
Voronoi
was developed as part of the Google Summer of Code 2010. The
library was actively maintained for the last two years and involved
strong mathematical research in the field of algorithms, data
structures,
relative error arithmetic and numerical robustness. Nowadays one can
often read a scientific article that contains non-practical theoretical
results or implementation with
benchmarks nobody else can reproduce. The opposite story is with
the Boost.Polygon Voronoi library. We provide pure implementation and
benchmarks one may run on
his PC. In case community finds it useful we will incrementally
add more documentation on the theoretical side of our implementation. The
authors would like to acknowledge the Steven Fortune's article "A Sweepline algorithm
for Voronoi diagrams", that contains the fundamental ideas of the
current implementation.
|
 Boost
C++ Libraries
Boost
C++ Libraries
